
Parametric Design and 3D Printing of a Boat
As part of a Project with the University of the Bundeswehr Munich under the supervision of Prof. Josef Kiendl, and in collaboration with the FH Münster / Münster School of Architecture, We have developed a parametric workflow that automatically adapts 3D-printing geometries to different process parameters, slicers and LFAM systems. The goal is to enable a robust CAD/CAM automation framework for 45° planar printing, independent of the specific machine configuration.
To validate this workflow under real LFAM conditions, a boat hull was printed entirely with 45° inclined layers. The demonstrator illustrates how rule-based parametrisation, algorithmically generated bridge surfaces and continuous toolpaths can produce self-supporting, watertight structures without support material.
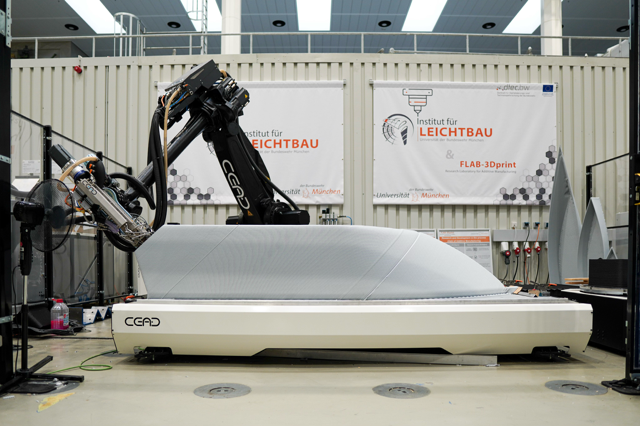
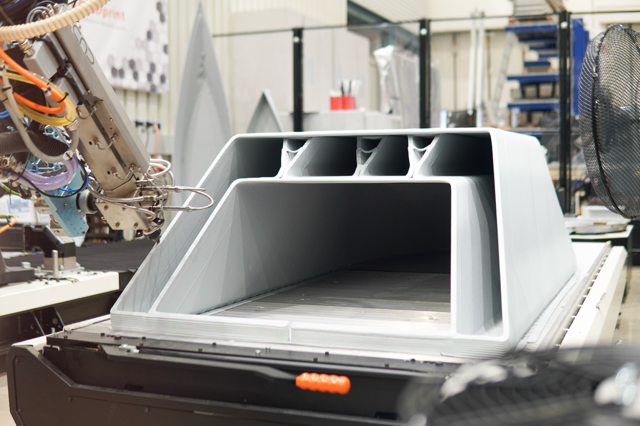


Fabrication at the FLAB, UniBw Munich
The prototype was produced on a CEAD LFAM system within the dtec.bw research project at the Forschungszentrum Leichtbau (FLAB), with support from Tobias Herrlein. Water-tightness and functional behaviour were subsequently tested in the Hydraulics Laboratory with assistance from Dr.-Ing. Ivo Baselt. This demonstrator forms the foundation of a PhD “Parametric Automation of Geometry and Toolpaths for LFAM”, which continues to explore adaptive geometry preparation, continuous toolpaths and advanced slicing strategies for large-format additive manufacturing.